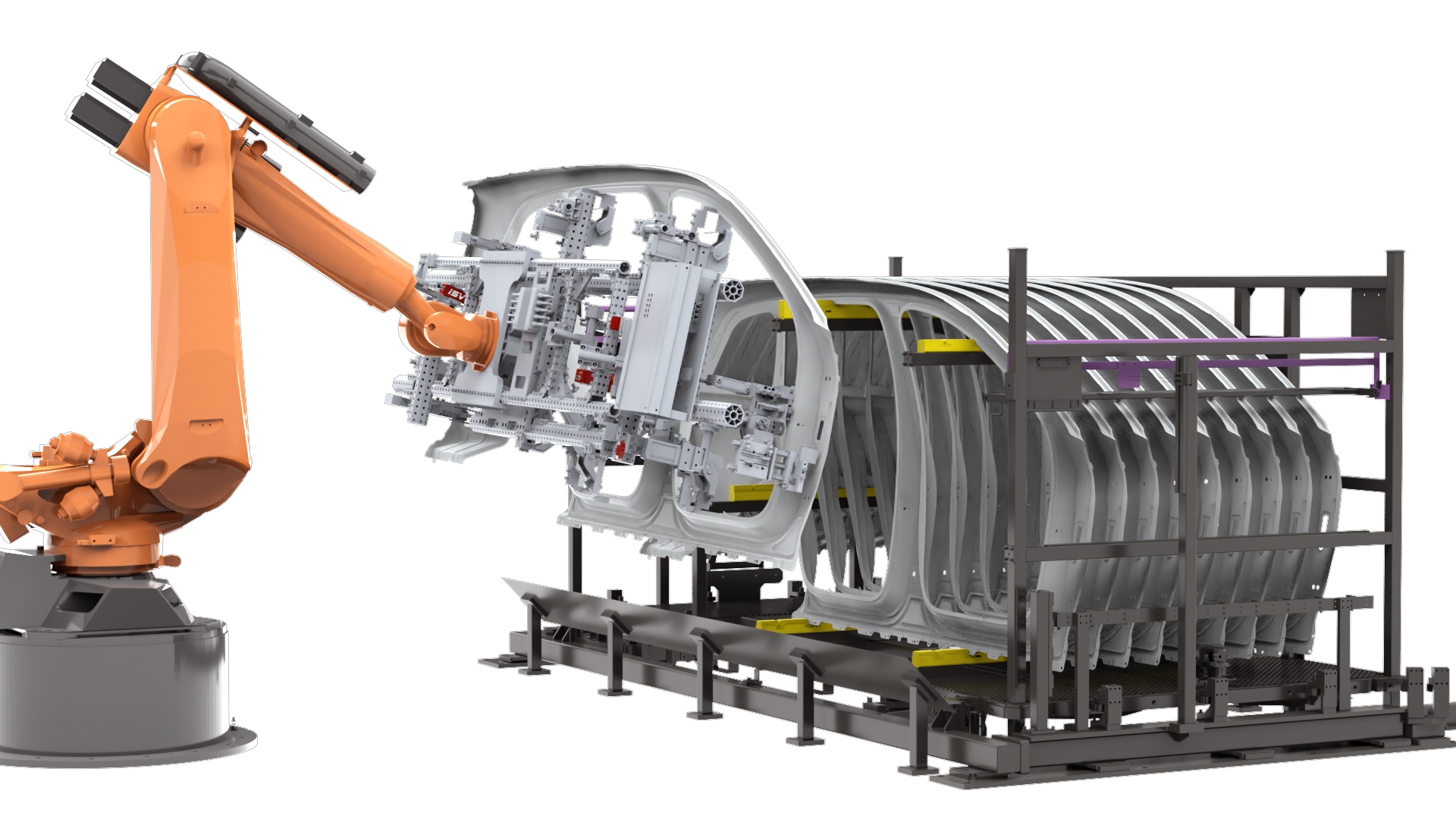
[Giải pháp hướng dẫn vận chuyển và cấp liệu dựa trên nhiều công nghệ như định vị đa đặc tính hình ảnh và khớp điểm 3Dbóng đá số trực tuyến, cho phép robot tự điều chỉnh quỹ đạo để lấy chi tiết từ dụng cụ một cách linh hoạt. Giải pháp này thay thế mô hình vận chuyển thủ công truyền thống, không chỉ giảm thiểu yêu cầu về độ phức tạp trong thiết kế dụng cụ mà còn giảm chi phí nhân công, đạt hiệu quả giảm giá thành đáng kể.]
- Trang chủ
- Về chúng tôi
-
Phương án ngành
<div class="redline"></div> <h5><a href="/h2r98498.html">Trung tâm sản phẩm</a></h5>

- Lĩnh vực ứng dụng
- <a href="/xbqibwd6.html">Tuyển dụng nhân tài</a> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a> Tuyển dụng nhân tài <div class="navlist navlist2"> <div class="width1170"> <div class="L"> <div class="redline"></div> <h5><a href="/xbqibwd6.html">Tuyển dụng nhân tài</a></h5> <h5> <a href="/xbqibwd6.html" onclick="open_job_link()">Tuyển dụng nhân tài</a></h5> <h5><a href="https://isv-tech.zhiye.com/">Tuyển dụng nhân tài</a></h5> <div class="navlistimg"> <img alt="" src="/jpg/0mklthh6.jpg"/> </div> </div> <div class="R"> <div class="navbox"> <ul> <li><a href="/xbqibwd6.html">Tuyển dụng sinh viên</a></li> <li><a href="/portal/list/index/id/229.html">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi nhân văn</a></li> </ul> <ul> <li><a href="https://isv-tech.zhiye.com/Campus" >Tuyển dụng sinh viên</a></li> <li><a href="https://isv-tech.zhiye.com/Social" >Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi nhân văn</a></li> </ul> <ul> <li><a href="/xbqibwd6.html" onclick="open_job_link1()">Tuyển dụng sinh viên</a></li> <li><a href="/portal/list/index/id/229.html" onclick="open_job_link2()">Tuyển dụng xã hội</a></li> <li><a href="/kpr4uazc.html">Phúc lợi nhân văn</a></li> </ul> </div> </div> </div> </div>
- Liên hệ với chúng tôi